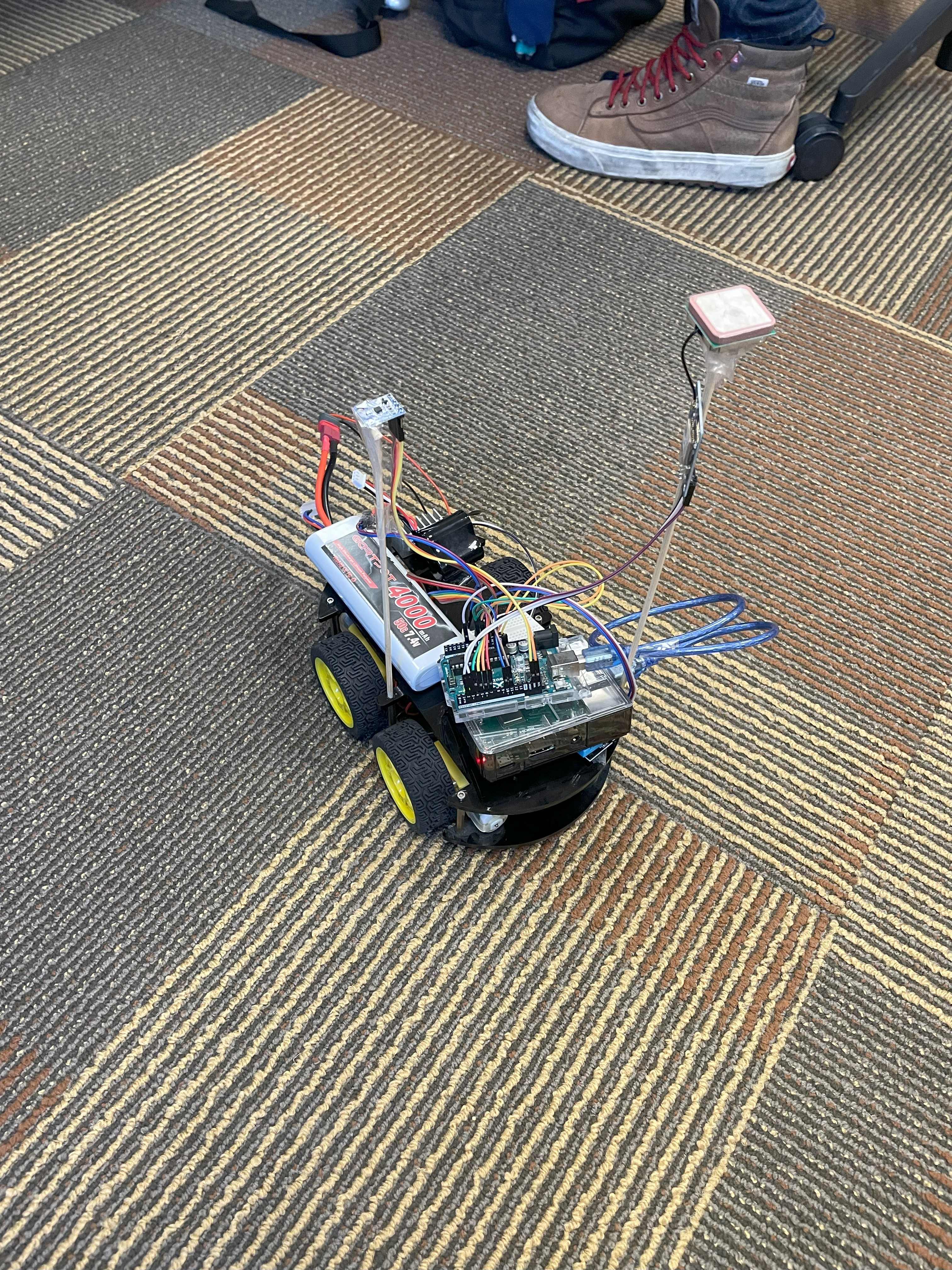
This project for CS370 aimed to develop a cost-effective, user-friendly, and flexible solution for remote data collection and monitoring by leveraging the capabilities of a Raspberry Pi and Arduino. The solution evolved into an autonomous rover equipped with sensors and controlled via a locally hosted web interface. Initially, our team of three students explored communication between two Raspberry Pis over separate networks but pivoted to a locally networked solution due to issues with accessibility, complexity, and user-friendliness. By utilizing a mobile platform, the rover overcame the proximity limitations of local communication and provided a versatile tool for various data collection applications.
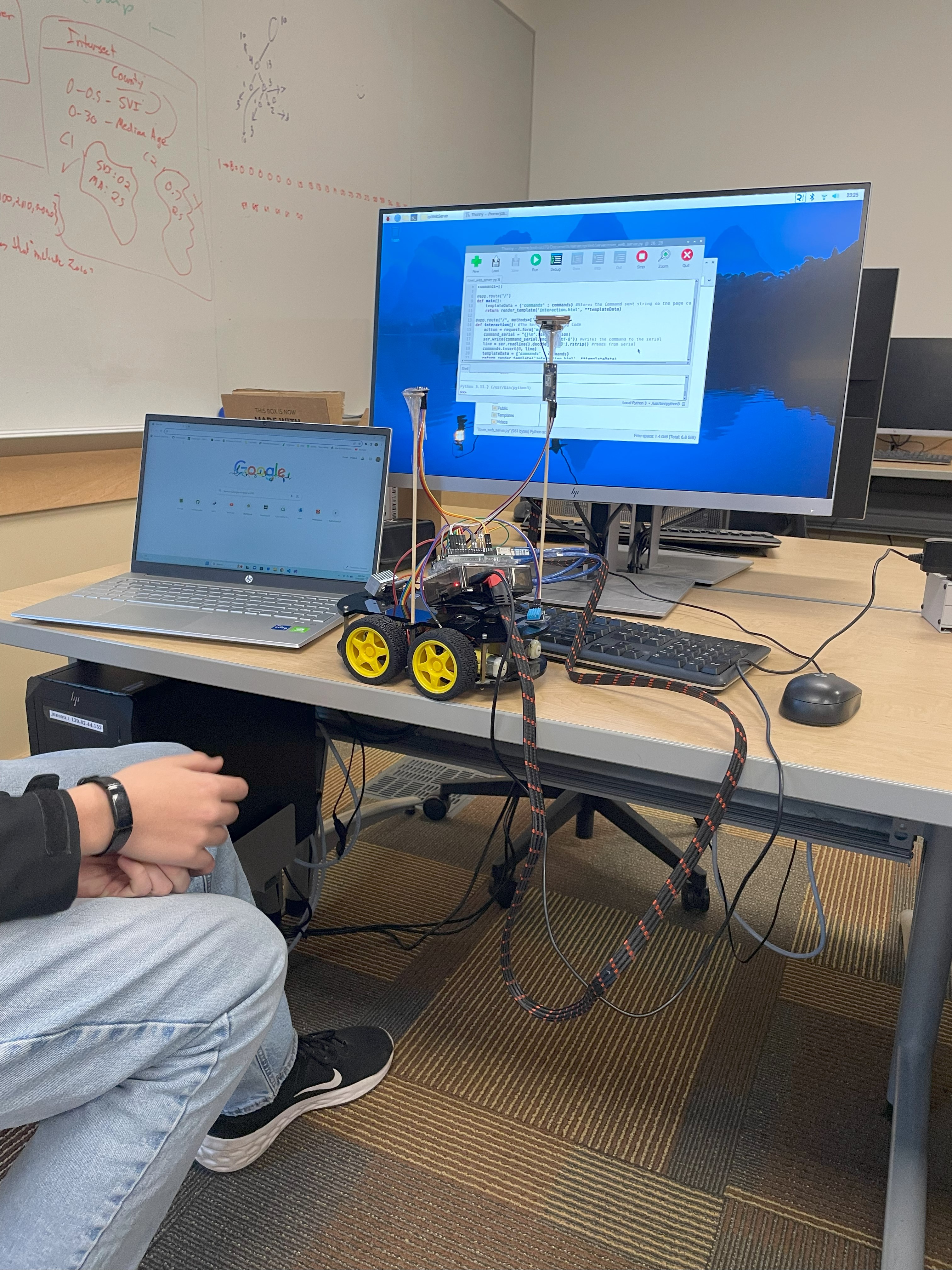
Picture of the rover on a desk with the code open in the background. It is attached to external power but also has a battery attachment.